You might also like:
- Arduino hx711 tutorial
- Arduino magnetic switch
- Best Arduino Kits
- gifts for engineering students
- gifts for engineers
- mpu6050 Arduino projects
- Current sensor Arduino
- Soil Moisture Sensor With Arduino
- Arduino Count up Timer Using the Nokia 5110 LCD
- Arduino Yun: Integrating or Juxtaposing Arduino with Linux
- Arduino Projects: Line Follower Robot
- Arduino RFID Project for Beginners
- Arduino MOSFET Project
- Which Arduino Should You Buy
- What Can You Do With Arduino Boards?
- Great Alternatives to the Arduino Microcontroller
- Arduino Projects: Color Sensor
- Arduino IDE Alternatives
- Arduino Mega vs. Uno
- Arduino Projects: Arduino LCD Display
- Read Arduino Rotary Encoders
- A Selection of the Best Arduino Simulators
- Arduino Projects: IR Receiver
- Arduino Light Sensor Project
- Arduino Projects: Arduino Decibel Meter
- Arduino Stopwatch Project
- Arduino Bluetooth RC Car Project
- Arduino Temperature Logger Project
- Arduino Projects: Arduino 7 Segment Display
- Arduino Projects: Clap ON Clap OFF Light
- Arduino Relay Project
- Install a Library Onto the Arduino IDE
- Arduino Projects: Rainfall Detector
- Arduino Projects: RGB LED Arduino
- Arduino Stepper Motor Project
- Arduino Projects: Arduino DC Motor Control
- The Top Affordable Arduino Robot Kit
- Arduino 3D Printed Case
- Arduino Projects: Asynchronous LEDs Blink
- Arduino Projects: Ultrasonic Distance Sensor
- Arduino Projects: LED – 4X4X4 LED Cube
- Arduino Car Projects: Build an Obstacle Avoiding Robot With Less Than $30
- Arduino Projects: Servo Potentiometer Control
- Arduino LED Project: Knight Rider
- Arduino Projects: PIR Motion Sensor
- The Difference between Arduino and Raspberry Pi
- Top 9 Books Every Engineer Should Read
- Top Used Sensors for Arduino
- First Hand on the Arduino Uno Board
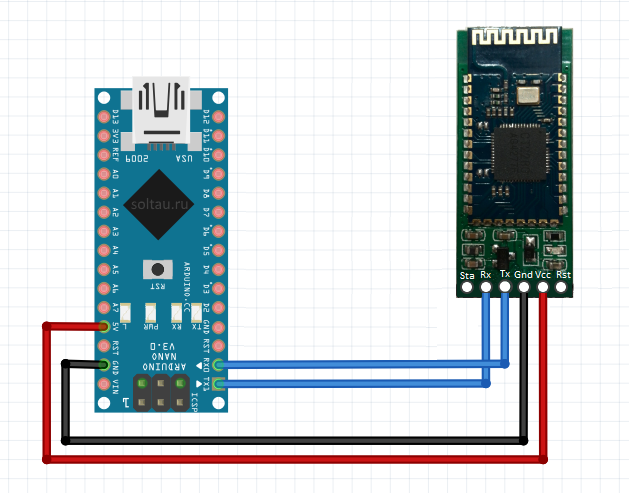
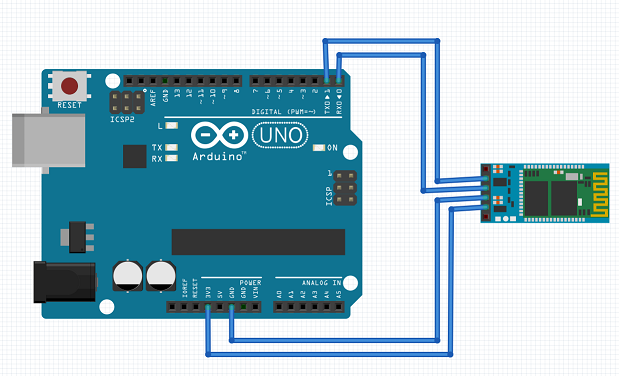
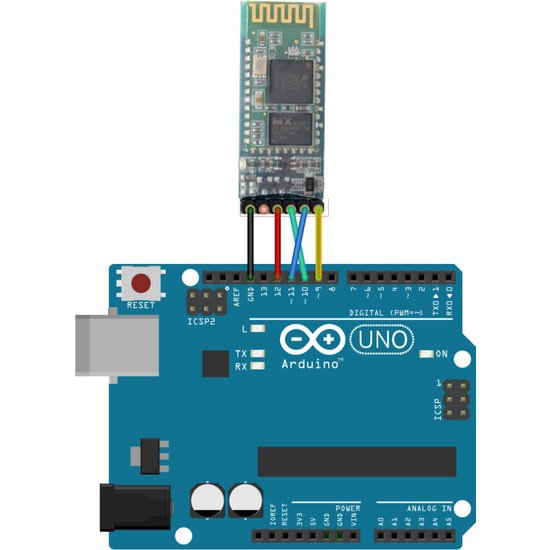
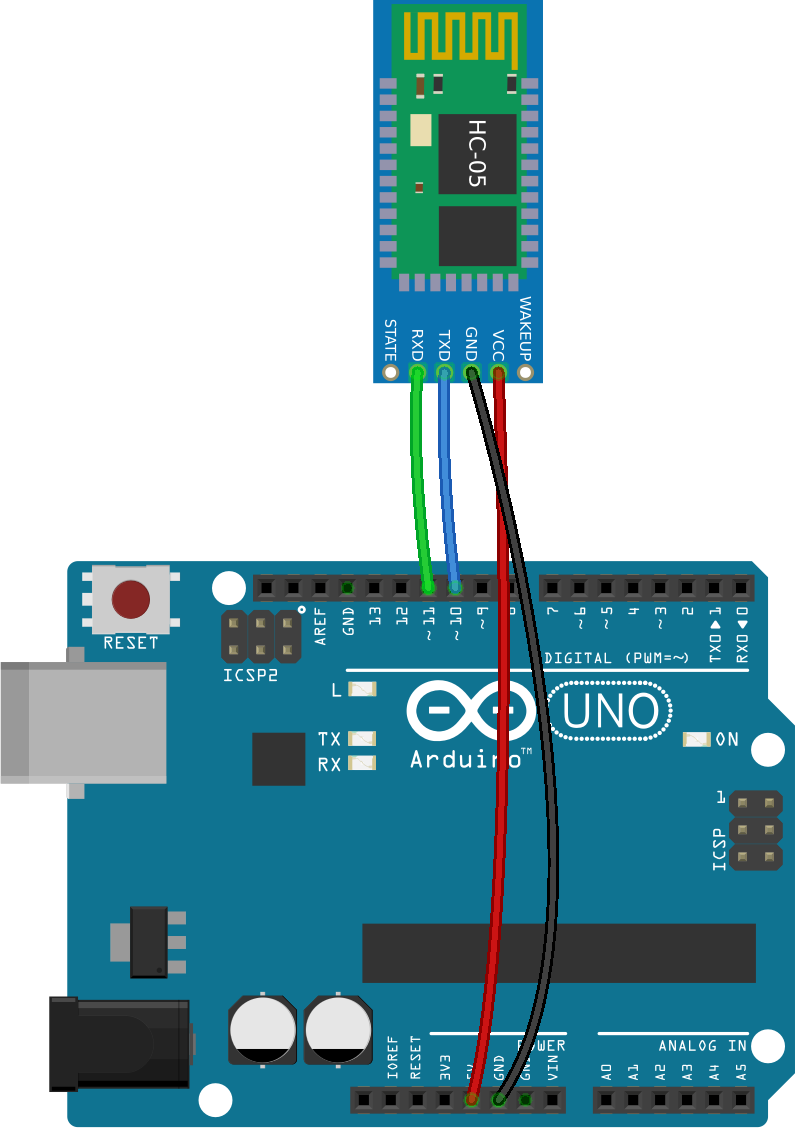
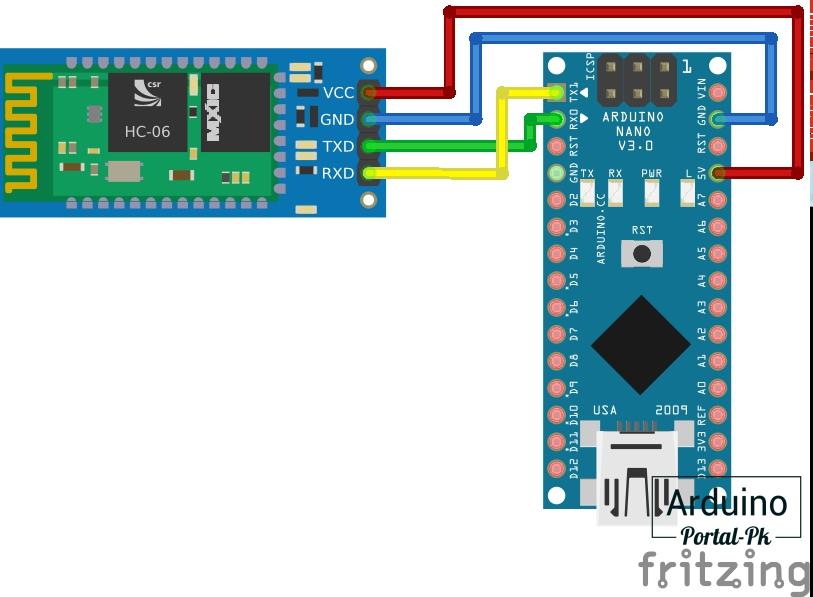
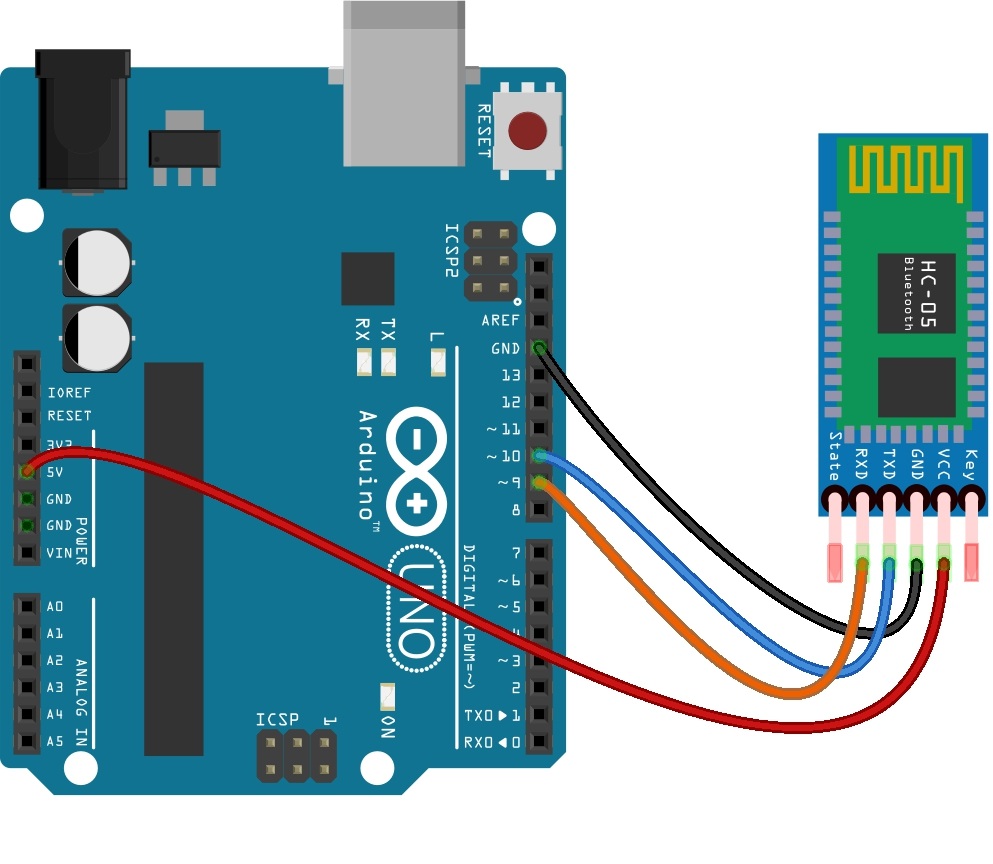
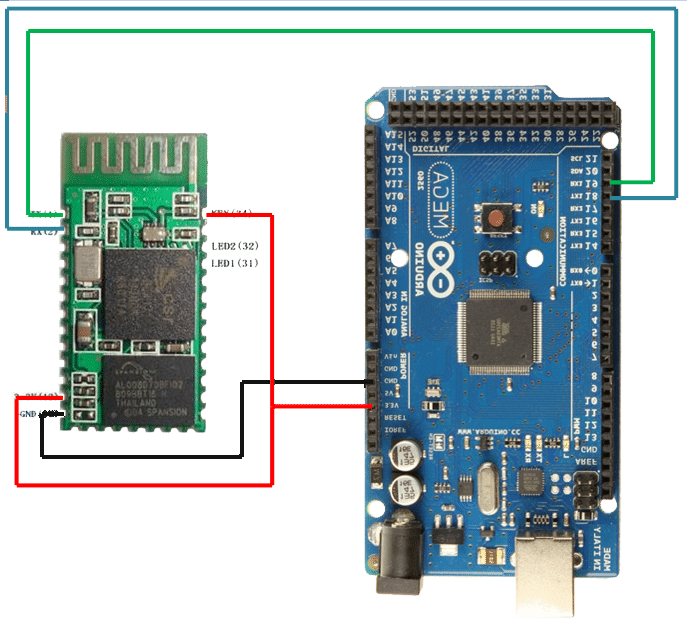
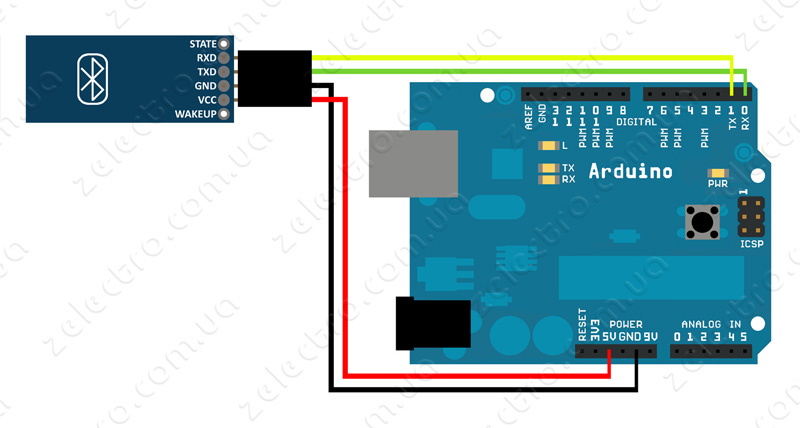
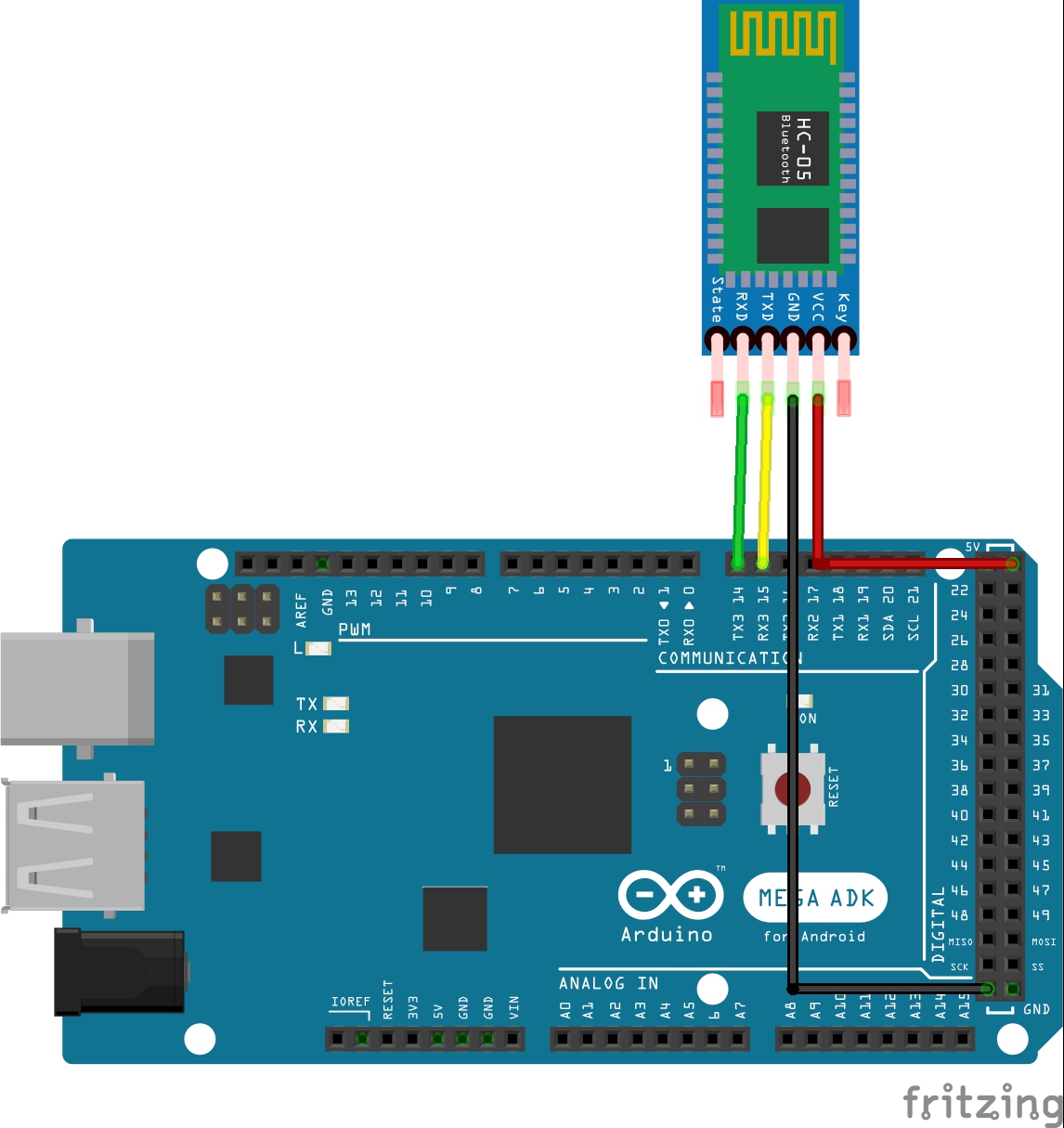
Подключение Bluetooth
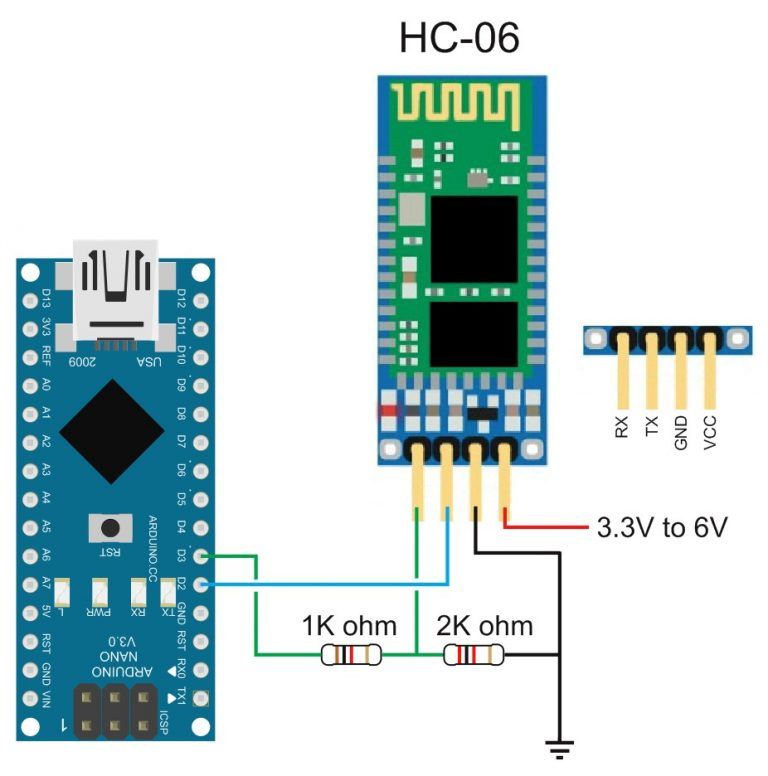
Есть оговорка: порты 0 и 1 по умолчанию используются Serial, через который заливает скетч. То есть, пока воткнут блютуз, скетч не зальется. Есть два выхода: вынимать блютуз на время заливки или переназначить входы и выходы блютуза. Второй вариант осуществляется двумя строчками
#include \\подключение библиотеки
SoftwareSerial BTSerial(8, 9); \\установка 8 и 9 пина заместо 0 и 1
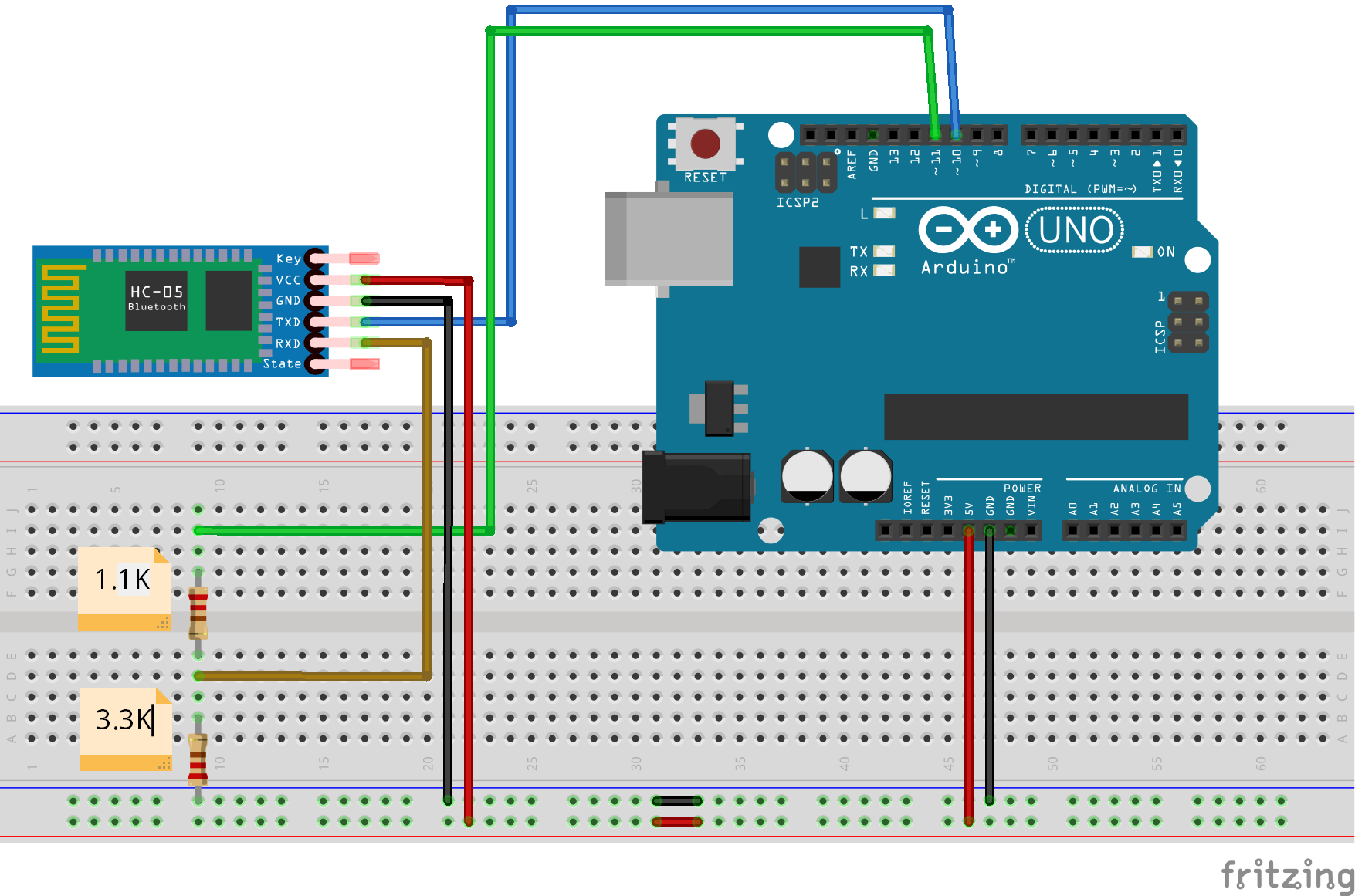
Подводный камень, съевший у меня трое суток работы – скорость общения. По привычке установил 9600 и пошел пробовать. То данные не приходили, то была каша символов
И в конце концов ответ – модель HC-05 общается на 38400! Очень сильно обратите внимание на то, что в Setup() я выполню BTSerial.begin(39400), хотя Serial.begin(9600)
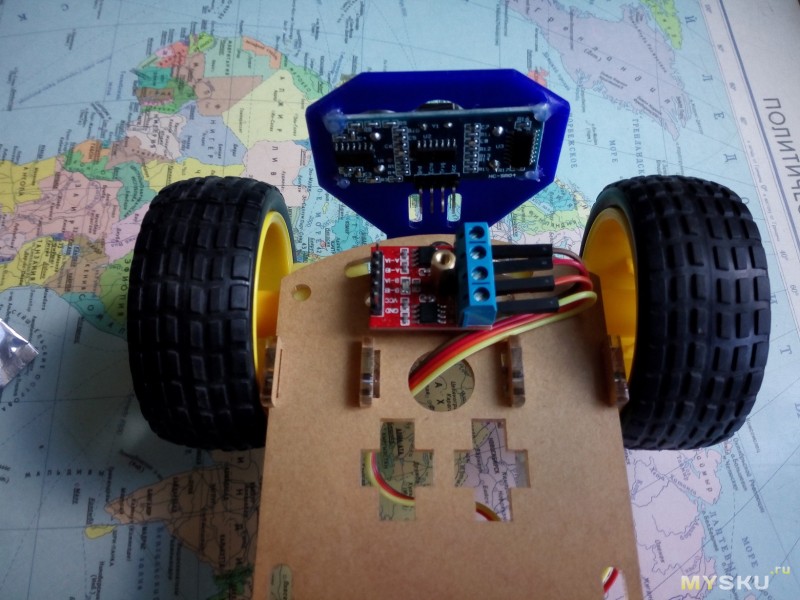
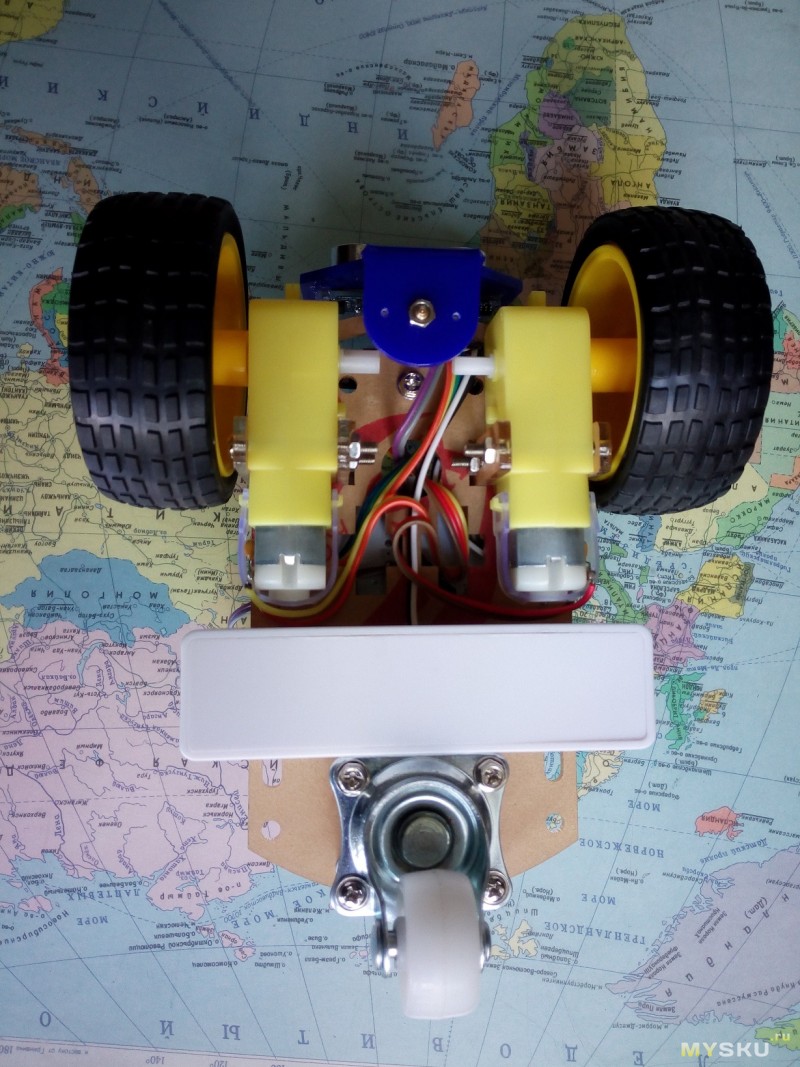
Структура робота
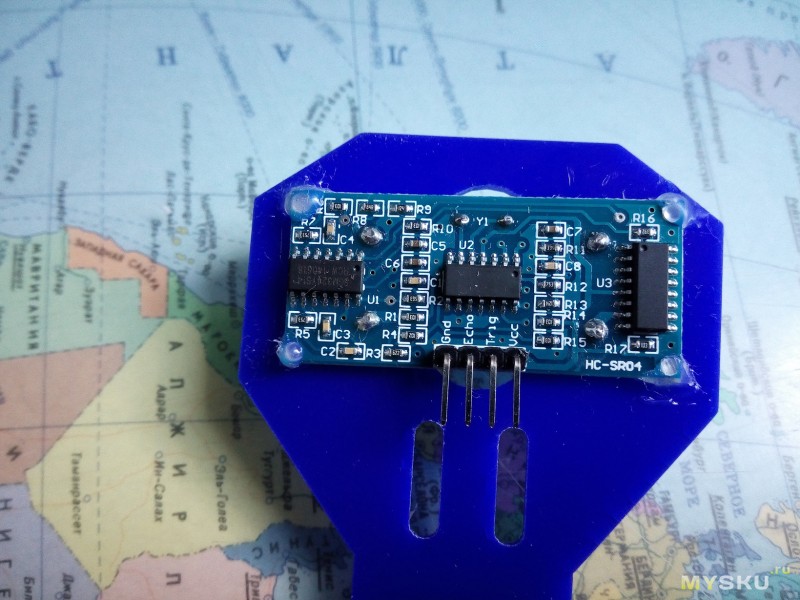
Итак, мы определились с идеей, перейдем к компоновке. Список элементов формируется из того, что должен уметь робот. Тут всё вполне очевидно, поэтому сразу посмотрим на нумерацию: «Мозги» робота — плата arduino uno (1); была в заказанном из Китая наборе. Для наших целей ее вполне хватает (ориентируемся на количество используемых пинов). Из этого же набора мы взяли готовое шасси (2), на которое крепятся два ведущих колеса (3) и одно заднее (свободно вращающееся) (4). Также в наборе был готовый батарейный отсек (5). Спереди у робота стоит ультразвуковой датчик (HC-SR04) (6), сзади — драйвер двигателей (L298N) (7), по центру — светодиод-мигалка (8), и чуть в стороне — пищалка (9). На этапе компоновки мы смотрим: — чтобы все влезло — чтобы было сбалансировано — чтобы было рационально размещено Частично это уже сделали за нас китайские коллеги. Так, тяжелый батарейный отсек поставлен в центр, и примерно под ним стоят ведущие колеса. Все остальные платы легкие, их можно размещать по периферии. Нюансы:
- В шасси из набора есть много заводских отверстий, но какая в них логика — я так и не разобрался. Двигатели и аккумуляторный блок закрепились без проблем, дальше началась «подгонка» со сверлением новых отверстий, чтобы закрепить ту или иную плату.
- Весьма выручили латунные стойки и прочий крепеж из запасников (иногда приходилось выкручиваться).
- Шины от каждой платы пропускал через зажимы (опять же нашел в запасниках). Весьма удобно, все провода лежат красиво и не болтаются.
Обучение Arduino
Не знаете, с чего начать изучение Arduino? Подумайте, что вам ближе — сборка собственных простых моделей и постепенное их усложнение или знакомство с более сложными, но готовыми решениями?
Машинка на arduino и Bluetooth без редактирования кода. Мы будем использовать специализированный бесплатный софт для составления скетча. Кроме того не надо покупать шасси для нашей поделки, подойдет практически любая неисправная радиоуправляемая модель автомобиля или танка.
Предлагаю посмотреть обзорный видеоролик про блютуз-управляемую машинку и ее начинку.
Итак, давайте разберем на живом примере как сделать своими руками дистанционно управляемую по bluetooth c android планшета или смартфона машинку. Статья, как ни странно, рассчитана на начальный уровень знаний. Здесь нет руководства по редактированию кода в Arduino IDE, да и мы использовать его будем только для заливки нашего кода. А составлять алгоритм управления будем в программе под названием FLProg. Программа управления со смартфона — HmiKaskada_free. Но сначала о железе, которое нам понадобится.
Скетч для управления роботом на Arduino по Bluetooth через смартфон на Android
В своём скетче я реализовал следующие функции:
- Движение вперед
- Движение назад
- Разворот влево
- Разворот вправо
- Плавный поворот влево при движении вперед
- Плавный поворот вправо при движении вперед
- Плавный поворот влево при движении назад
- Плавный поворот вправо при движении назад
- Остановка
Установка скорости 0%
Установка скорости 10%
Установка скорости 20%
Установка скорости 30%
Установка скорости 40%
Установка скорости 50%
Установка скорости 60%
Установка скорости 70%
Установка скорости 80%
Установка скорости 90%
Установка скорости 100%
В скетче использовал функции, чтобы не дублировать код при схожих событиях.
Видео инструкция по сборке робота на Ардуино
Предлагаем вашему вниманию подробную видео-инструкцию по сборке робота автомобиля на Ардуино от нашего партнера – канала ArduMast Club.
Здравствуйте. В данной статье я хочу описать процесс сборки своего первого робота на ардуино. Материал будет полезен другим таким же новичкам, как и я, которые захотят изготовить какую-нибудь «самобеглую тележку». Статья представляет собой описание этапов работы с моими дополнениями по различным нюансам. Ссылка на итоговый код (скорее всего, не самый идеальный) дана в конце статьи. По мере возможности я привлекал к участию своего сына (8 лет). Что именно с ним получалось, а что нет — на это я выделил часть статьи, возможно, кому-то пригодится.
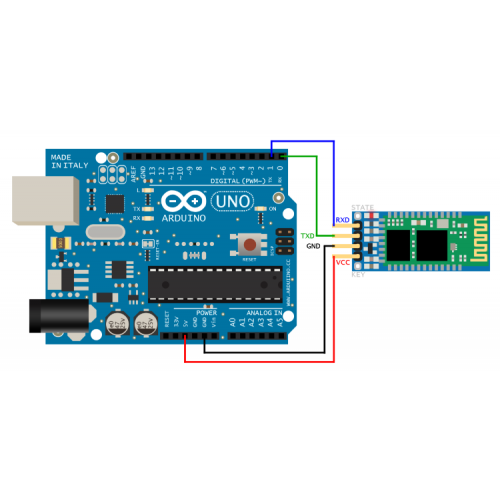
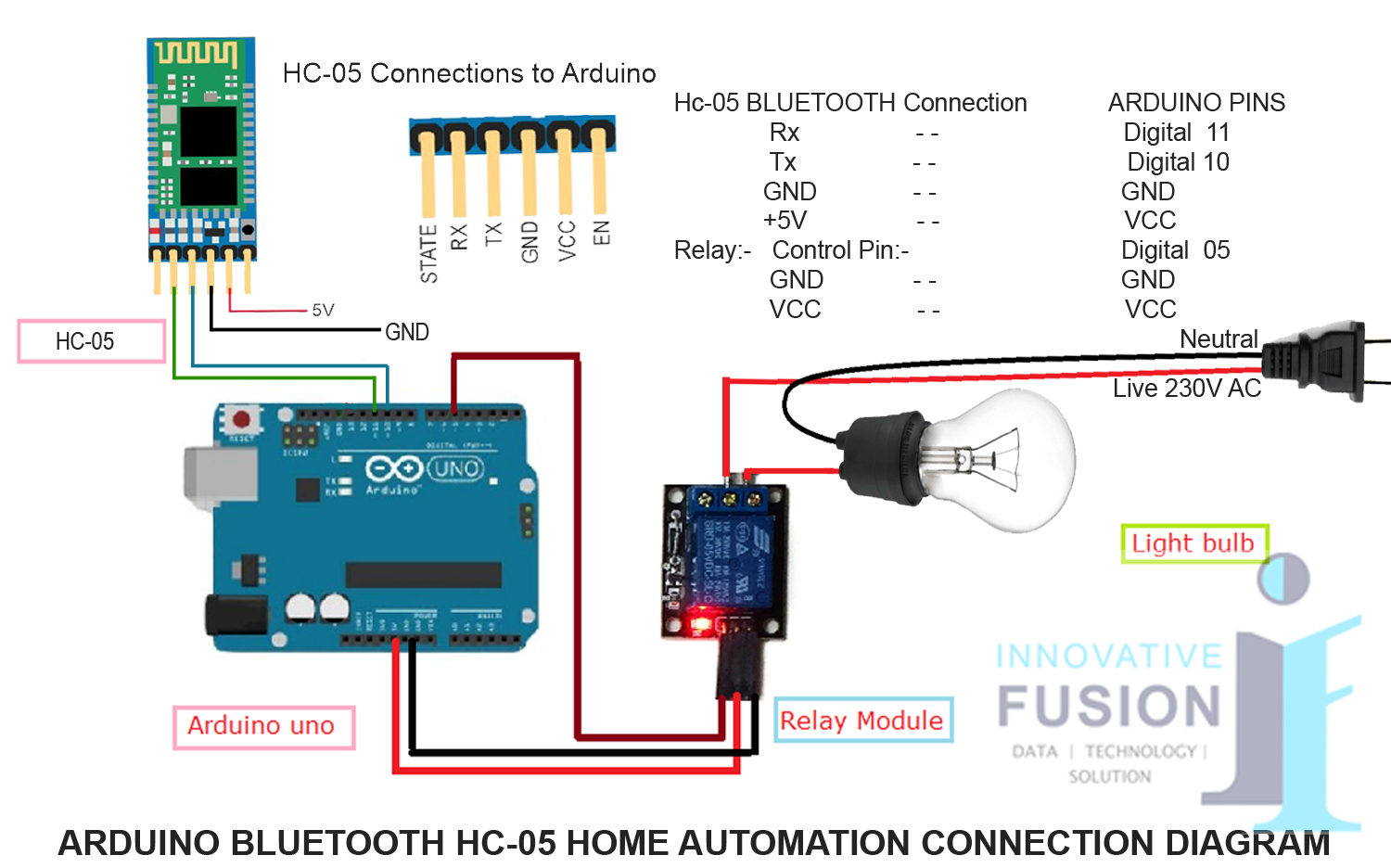
Работа схемы
Схема устройства представлена на следующем рисунке.
Драйвер мотора используется для управления двигателями машины. Его контакты 2, 7, 10 и 15 подсоединены к цифровым контактам Arduino 12, 11, 10 и 9 соответственно. Один из двигателей подключен к выходным контактам драйвера мотора 3 и 6, а другой – к контактам 11 и 14. Батарейка 6 Вольт также используется для питания драйвера мотора – а через него для питания двигателей. Контакты rx и tx Bluetooth модуля непосредственно подключены к контактам tx и rx платы Arduino. Батарейка 9 Вольт используется для подачи питания на контакт Arduino Vin.
Шаг 3. Моторы (приводы)
В этом проекте используются 6В моторы постоянного тока. Вы можете использовать любой вид приводов на 6В постоянного тока. После того как вы купили моторы, нужно их подготовить перед размещением на шасси.
Отрежьте 4 кусочка красного и черного провода длиной примерно от 5 до 6 дюймов (12 — 15 см). Можно использовать провода 0,5 мм. Снимите изоляцию с проводов на каждом конце. Припаяйте провода к клеммам двигателей.
Вы можете проверить полярность двигателя, подключив его к батарейному блоку. Если он вращается в прямом направлении (красный провод с положительного и черный провод с отрицательного вывода батареи), то соединение правильное.

Программа Bluetooth RC Car — управление роботом-машинкой со смартфона на Android
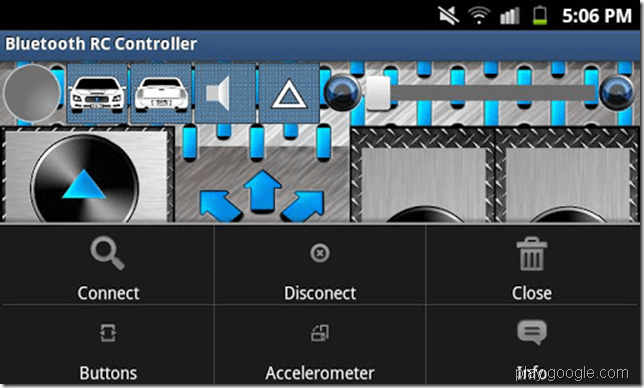
В свой смартфон я установил программу Bluetooth RC Car . На мой взгляд — это лучшая софтинка для управления роботом-машинкой.
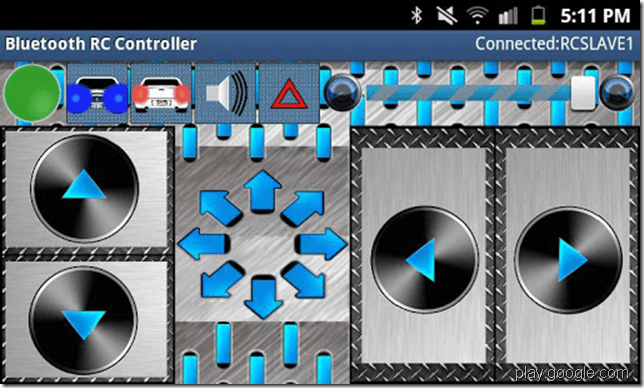
Программа позволяет передавать команды при нажатии на кнопки или реагировать на данные с акселерометра в смартфоне, регулировать скорость движения ползунком, включать передние и задние фонари, включать и выключать звуковой сигнал, включать и выключать сигнал “аварийка”.
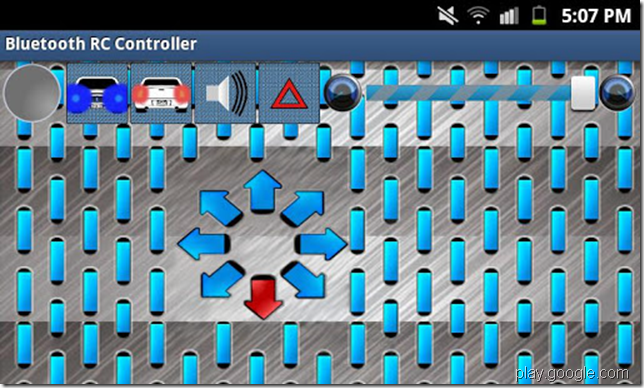
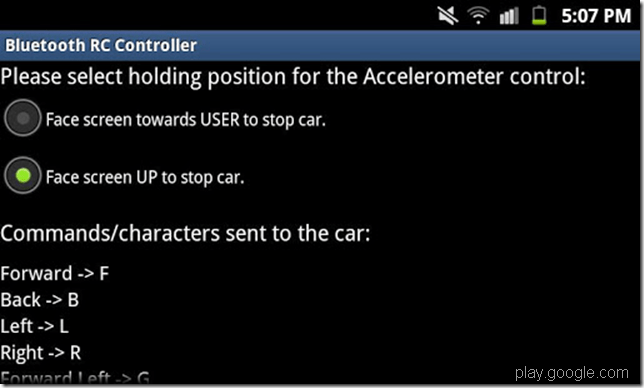
Для работы программы требуется Android версии 2.3.3 или выше. Размер программы 3 мегабайта.
Список команд:
- F – вперед
- B – назад
- L – влево
- R – вправо
- G – прямо и влево
- I – прямо и вправо
- H – назад и влево
- J – назад и вправо
- S – стоп
- W – передняя фара включена
- w – передняя фара выключена
- U – задняя фара включена
- u – задняя фара выключена
- V – звуковой сигнал включен
- v – звуковой сигнал выключен
- X – сигнал “аварийка” включен
- x — сигнал “аварийка” выключен
- 0 – скорость движения 0%
- 1 – скорость движения 10%
- 2 – скорость движения 20%
- 3 – скорость движения 30%
- 4 – скорость движения 40%
- 5 – скорость движения 50%
- 6 – скорость движения 60%
- 7 – скорость движения 70%
- 8 – скорость движения 80%
- 9 – скорость движения 90%
- q – скорость движения 100%
Как вы видите, полигон для творчества вполне неплохой. Я бы еще добавил возможность раздельного включения правых и левых фонарей для передних и задних фар.
Жирным я выделил команды, поддержка которых уже реализована в скетче. Остальные я собираюсь использовать по другому назначению.
Принцип передачи команд: при нажатии на кнопку в программе, команда передается по Bluetooth один раз, а при отпускании кнопки сразу передается команда S-остановка.
Сборка


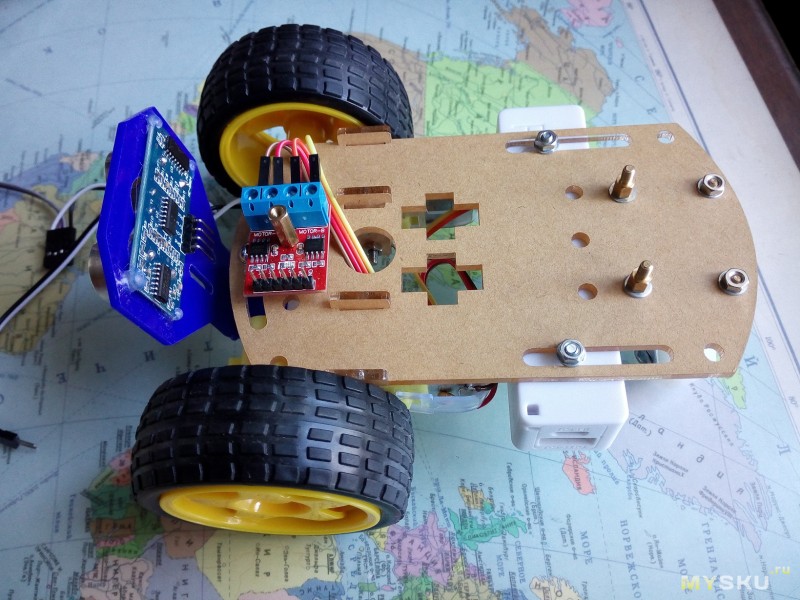
Крепим драйвер двигателя, подключаем моторы.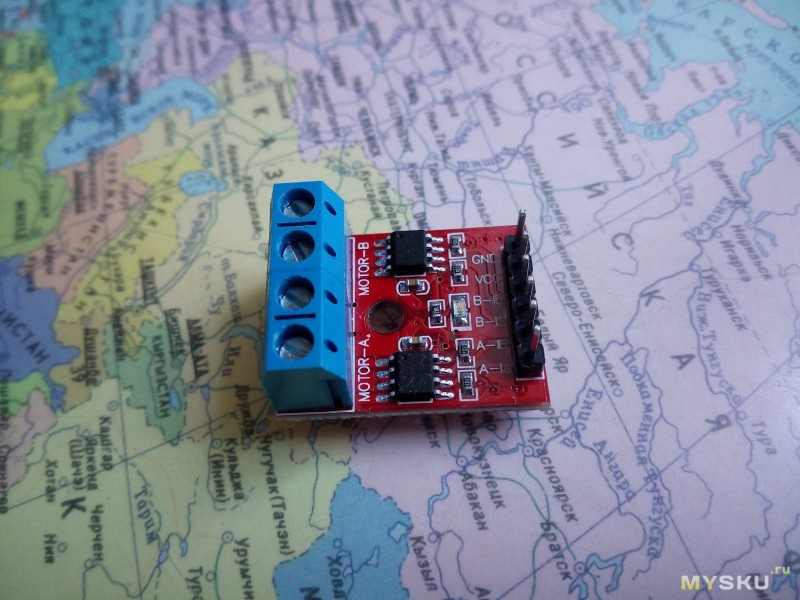
Приспосабливаем повербанк вместо батарейного отсека.
Для этого делаем два отверстия под винты м3 для крепления на шасси, припаиваем два проводка �+� и �-� к USB на плате и выводим провода через еще одно просверленное отверстие. К сожалению у меня не было под руками подходящего выключателя, так что эту функцию будет выполнять отключение проводков от ардуины. Далее крепим это дело на шасси.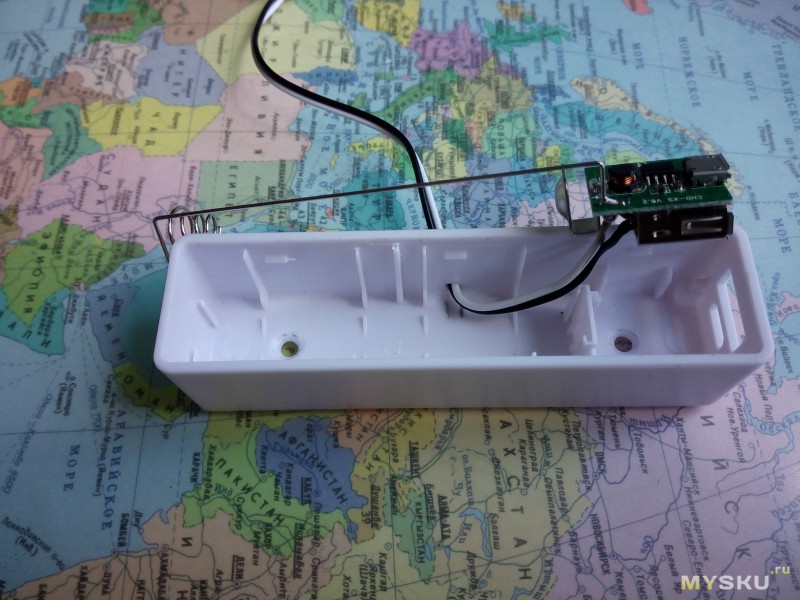
Ставим ардуину, подключаем провода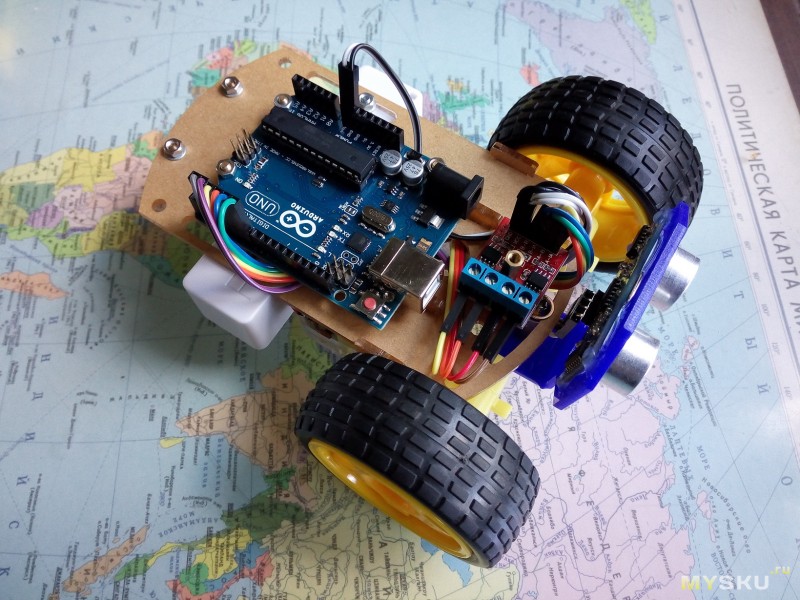
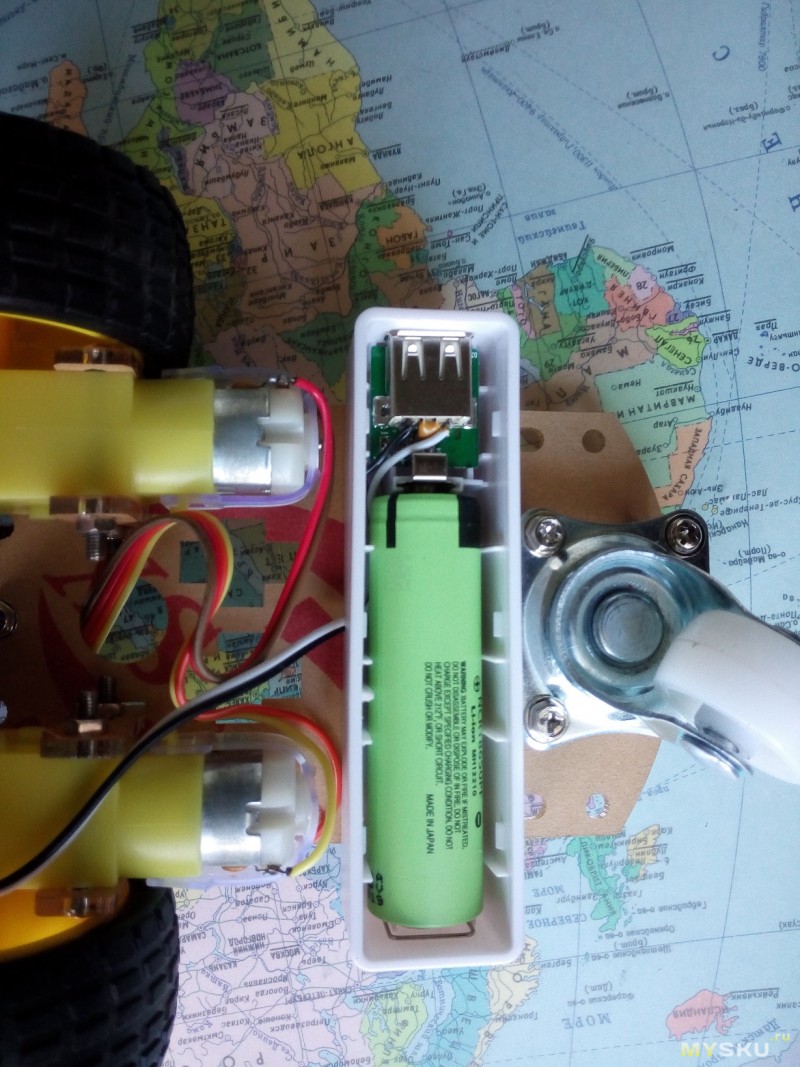
Удобно, что заряжается аккумулятор через повербанк.
Вставляем аккумулятор прошиваем (воспользовался средой atmel studio 6), переворачиваем, чтобы не убежала, и тестируем, что получилось.
На первый взгляд все норм, если появляется препятствие машинка отворачивает в сторону, проверяет наличие препятствия и в случае повторного обнаружения поворачивает в другую сторону. Что получилось на практике: препятствия обнаруживает на ура, поворачивает неплохо, опытным путем поставил нужные задержки, но практически не способна ехать по прямой из-за заднего направляющего колеса. Скорее всего это мне попался такой «тугой» вариант, но из-за этого машинка всегда едет по диагонали, мелочь, а неприятно.
Схема сборки машинки на Ардуино
Если у вас есть все необходимые детали (в проекте можно обойтись без светодиодов и резисторов), то далее мы рассмотрим, как сделать машинку из ардуино своими руками. Для начала следует припаять к контактам моторчиков провода и зафиксировать их изолентой, чтобы контакты не оторвались. Провода необходимо соединить с клеммниками M1 и M2 на Motor Shield (полярность потом можно будет поменять).
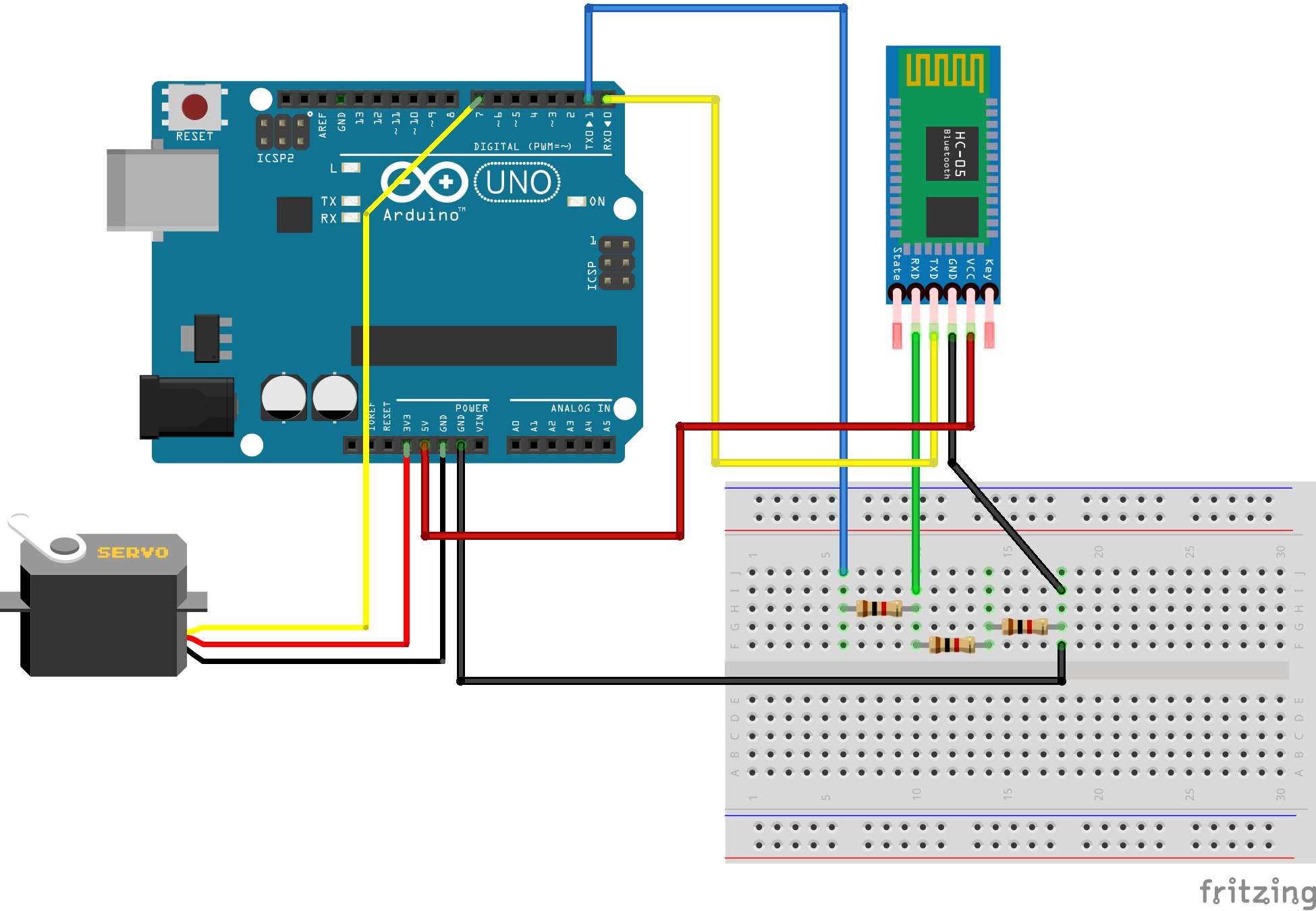
Питание на Bluetooth модуль идет от контактов для сервопривода, в проекте серво нам не понадобятся. А на питание идет стабилизированное напряжение 5 Вольт, что нам подходит. К портам TX и RX удобнее будет припаять коннекторы «мама», а к портам «Pin0» и «Pin1» на Motor Shield припаять штырьки (BLS). Таким образом, вы сможете легко отключать Bluetooth модуль от Arduino при необходимости загрузки скетча.
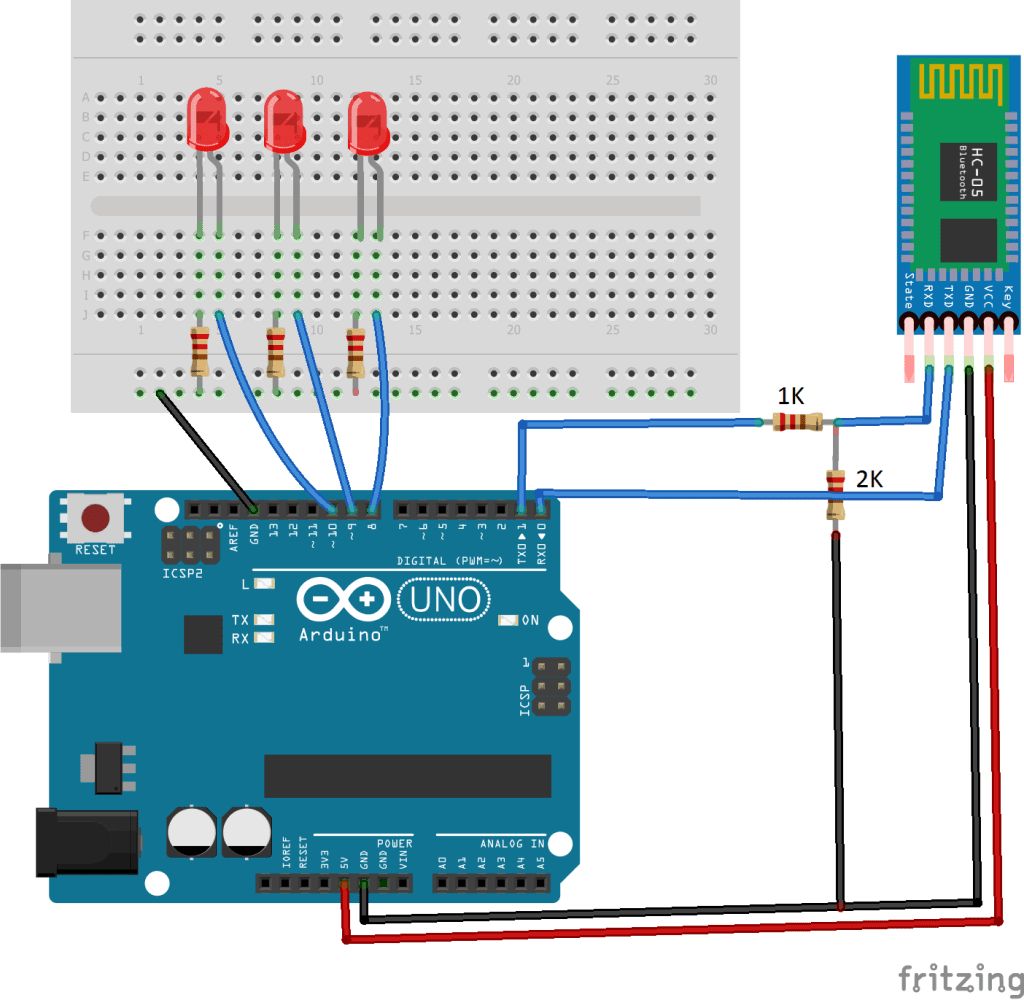
Управление светодиодами идет от порта «Pin2», здесь провод можно припаять напрямую к порту. Если вы делаете несколько машинок с Блютуз, которыми будете управлять одновременно, то рекомендуем сделать перепрошивку модуля HC-05 . Делается прошивка модуля очень просто, а затем вы уже не будете путать машинки, так как у каждой будет отображаться свое уникальное имя на Андроиде.
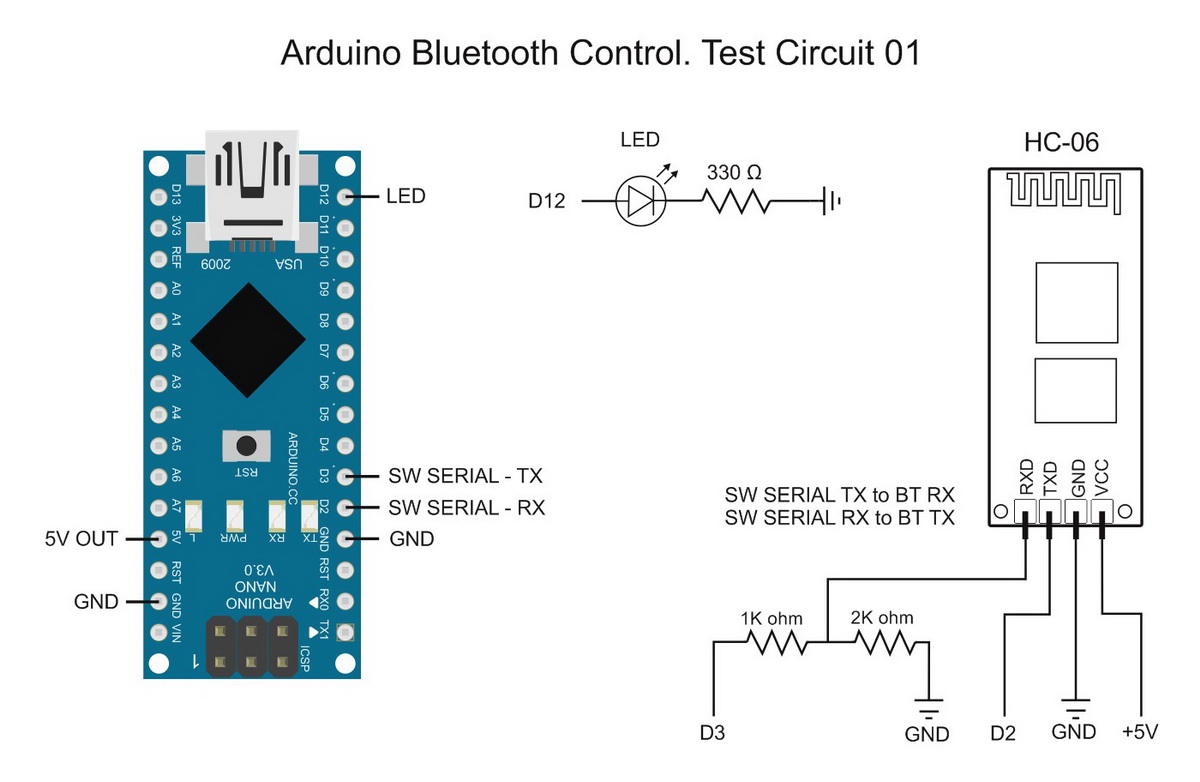
Writing Code for Arduino Bluetooth Car
Before writing the code, check out the values used by the BLE joystick app. Here is an image you can refer to:
We will use the AFMotor library, which will make the coding easy. You can download the library from here (click to download), or you can Goto >> Tools >> Manage Libraries >> Enter AFMotor.h in the search bar and install the library. Now, let’s talk about the code. Unlock the code walk-through by signing in below.
Let me explain the code in short so you can use it or write your own code to perform different tasks.
First, import the library and initialize variables and pins required in the code :
#include<AFMotor.h> //AFMotor library AF_DCMotor motorR(1); //Right motor connected to output 1 AF_DCMotor motorL(2); //Left motor connected to output 2 char data = 0; //variable to store characters received via bluetooth
Next, write the method where we will set the pin functions :
void setup()
{
Serial.begin(9600);
Serial.println("Motor test!");
motorR.setSpeed(200);
motorL.setSpeed(200);
}
Create Control Methods to Move the Robot Autonomously
After this function, write five different control methods that control the robot when a joystick button is pressed.
-
Forward: drives the robot forward
void forward() { Serial.println("Going Forward..."); delay(500); motorR.run(FORWARD); motorL.run(FORWARD); } -
Backward: makes the robot move backwards or in reverse
void backward() { Serial.println("Going Backward..."); delay(500); motorR.run(BACKWARD); motorL.run(BACKWARD); } -
Right: Turns the robot right
void right() { Serial.println("Turning Right..."); delay(500); motorR.run(RELEASE); motorL.run(FORWARD); } -
Left: makes the robot turn to the left side
void left() { Serial.println("Turning Left..."); delay(500); motorR.run(FORWARD); motorL.run(RELEASE); } -
Hold: stops the robot from moving
void hold() { Serial.println("Stop..."); delay(500); motorR.run(RELEASE); motorL.run(RELEASE); }
These are the basic functions for moving the Arduino Bluetooth Car. If you wish, you can add more features by writing additional methods. Now, it’s time to call these methods so that when a particular button is pressed from the BLE Joystick App, the robot responds accordingly.
Configure BLE Joystick App for Robot Control
Now finally we will write the method which will call the functions from above when a button is pressed.
void loop()
{
if(Serial.available() > 0) //if data is received
{
data = Serial.read(); //read and store it in variable data
Serial.println(data);
if(data == 'a')
{
forward(); //if received data is 'a' move forward
}
else if(data == 'c')
{
backward(); //if received data is 'c' move backward
}
else if(data == 'b')
{
right(); //if received data is 'b' turn right
}
else if(data == 'd')
{
left(); //if received data is 'd' turn left
}
else if(data == 'g')
{
hold(); //if received data is 'g' stop the bot.
}
}
}
Before you upload the code, make sure that you disconnect the TX and RX wires to the Arduino. If you forget to do this, the code wont upload, and the IDE will throw an error. Once the code is uploaded you can connect the TX & RX to module again, and you are good to go.
We’ve compiled the code for you into a sketch. Feel free to download it, make modifications, and try this for yourself!
Шаг 11. Код Ардуино
Программная часть довольно простая и не нужна никакая библиотека. Если вы понимаете логическую таблицу на предыдущих шагах, вы сможете написать собственный код. Скачать или скопировать код вы можете ниже:
// Код ошибки: код 01; Радиус поворота выше скорости; Код 02; Скорость выше 255;
#define in1 5 //L298n Motor Driver pins.
#define in2 6
#define in3 10
#define in4 11
#define LED 13
int command; //Int to store app command state.
int Speed = 204; // 0 - 255.
int Speedsec;
int buttonState = 0;
int lastButtonState = 0;
int Turnradius = 0; //Set the radius of a turn, 0 - 255 Note:the robot will malfunction if this is higher than int Speed.
int brakeTime = 45;
int brkonoff = 1; //1 for the electronic braking system, 0 for normal.
void setup() {
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
pinMode(LED, OUTPUT); //Set the LED pin.
Serial.begin(9600); //Set the baud rate to your Bluetooth module.
}
void loop() {
if (Serial.available() > 0) {
command = Serial.read();
Stop(); //Initialize with motors stoped.
switch (command) {
case 'F':
forward();
break;
case 'B':
back();
break;
case 'L':
left();
break;
case 'R':
right();
break;
case 'G':
forwardleft();
break;
case 'I':
forwardright();
break;
case 'H':
backleft();
break;
case 'J':
backright();
break;
case '0':
Speed = 100;
break;
case '1':
Speed = 140;
break;
case '2':
Speed = 153;
break;
case '3':
Speed = 165;
break;
case '4':
Speed = 178;
break;
case '5':
Speed = 191;
break;
case '6':
Speed = 204;
break;
case '7':
Speed = 216;
break;
case '8':
Speed = 229;
break;
case '9':
Speed = 242;
break;
case 'q':
Speed = 255;
break;
}
Speedsec = Turnradius;
if (brkonoff == 1) {
brakeOn();
} else {
brakeOff();
}
}
}
void forward() {
analogWrite(in1, Speed);
analogWrite(in3, Speed);
}
void back() {
analogWrite(in2, Speed);
analogWrite(in4, Speed);
}
void left() {
analogWrite(in3, Speed);
analogWrite(in2, Speed);
}
void right() {
analogWrite(in4, Speed);
analogWrite(in1, Speed);
}
void forwardleft() {
analogWrite(in1, Speedsec);
analogWrite(in3, Speed);
}
void forwardright() {
analogWrite(in1, Speed);
analogWrite(in3, Speedsec);
}
void backright() {
analogWrite(in2, Speed);
analogWrite(in4, Speedsec);
}
void backleft() {
analogWrite(in2, Speedsec);
analogWrite(in4, Speed);
}
void Stop() {
analogWrite(in1, 0);
analogWrite(in2, 0);
analogWrite(in3, 0);
analogWrite(in4, 0);
}
void brakeOn() {
//Here's the future use: an electronic braking system!
// read the pushbutton input pin:
buttonState = command;
// compare the buttonState to its previous state
if (buttonState != lastButtonState) {
// if the state has changed, increment the counter
if (lastButtonState == 'F') {
if (buttonState == 'S') {
back();
delay(brakeTime);
Stop();
}
}
if (lastButtonState == 'B') {
if (buttonState == 'S') {
forward();
delay(brakeTime);
Stop();
}
}
if (lastButtonState == 'L') {
if (buttonState == 'S') {
right();
delay(brakeTime);
Stop();
}
}
if (lastButtonState == 'R') {
if (buttonState == 'S') {
left();
delay(brakeTime);
Stop();
}
}
}
// save the current state as the last state,
//for next time through the loop
lastButtonState = buttonState;
}
void brakeOff() {
}
На этом всё. Хороших вам проектов.
Скетч
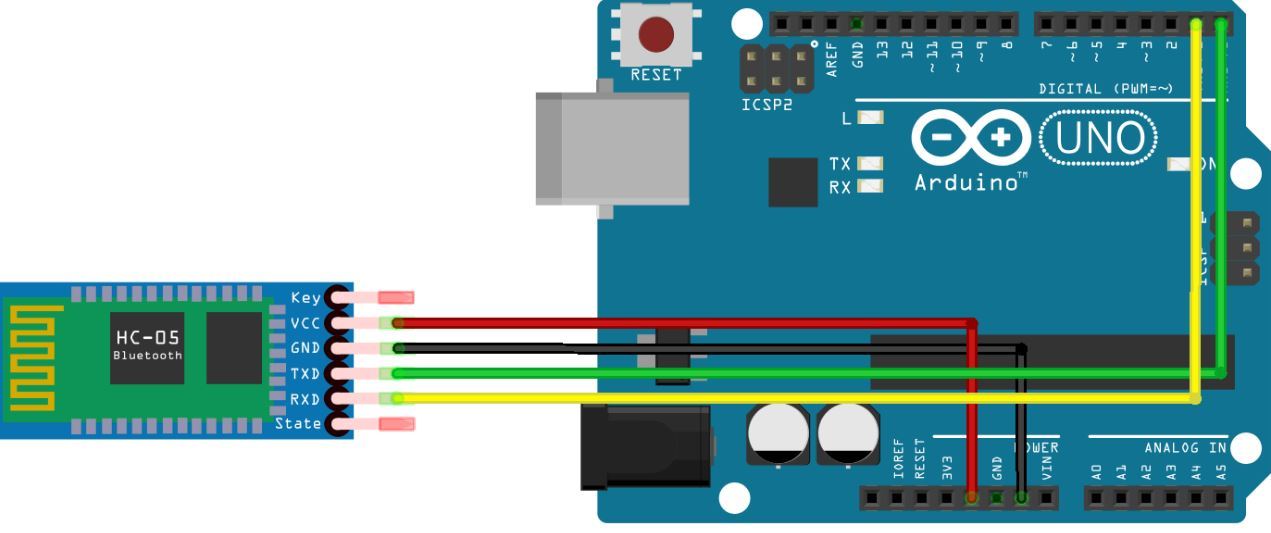
Перед прошивкой обаятельно отключите питание у Blutooth модуля. Для этого надо просто отсоединить один из его проводов питания.
В скетче прописанные необходимые поясняющие комментарии.
Движение и остановка колёс осуществляется за счёт функций. А в дальнейшем нужные комбинации функций просто вызываются в нужных местах кода одной строкой. Получается просто и компактный код. Ниже фрагмент кода примером двух таких функций:
Со смартфона приложение по Bluetooth посылает сигналы в виде латинских букв (W, S, E и т.д.). В зависимости от пришедшей команды, с помощью оператора if, вызываются комбинации тех или иных функции. Если вы будете использовать другое приложение, не то, которое я предоставлю ниже, то оно будет посылать другие команды, другие буквы. Соответственно, придётся переписать их в скетче.
Например, когда по Bluetooth приходит ‘ W ‘ вызываются две функции rightWheelForward (); и leftWheelForward (); что заставит оба мотора крутится вперёд.
А если приходит ‘E’, то вызываются функции rightWheelStop (); и leftWheelForward (); что заставит остановиться правый мотор и вращаться вперёд только левый, от чего машинка поведет вперёд вправо.
Есть три вида скорости, которые включаются, когда приходят команды ‘1’, ‘2’ и ‘3’. Скорость можно задавать от 0 до 250. На каждую и трёх команд в скетче прописаны скорости 120, 170 и 250, соответственно.
Если у вас уровень заряда аккумулятора уже на исходе, то при скорости 120 может не поехать или поехать, но не стабильно. Тогда лучше увеличить значение для первой скорости.
Скорость приходит в виде переменной motorSpeed в функцию analogWrite() и запускает двигатель с заданными оборотами.
Программа Arduino
Учитывая специфику проекта, вам надо внести в приведенный ниже базовый скетч достаточно много изменений, которые зависят от размера машинки и колес, скорости вращения колес, веса авто, освещения окружающей среды.
int irsensor = A5;
int measure = 1;
int ambientir = 0;
//настройка канала A (Channel A)
pinMode(12, OUTPUT); //инициализация контакта Motor Channel A
pinMode(9, OUTPUT); //Инициализация контакта тормоза — Brake Channel A
pinMode(irsensor, INPUT);
digitalWrite(irsensor, HIGH);
Serial.begin(9600);
ambientir = ambientir + analogRead(irsensor);
measure = measure + 1;
ambientir = ambientir / 10;
distance = analogRead(irsensor);
digitalWrite(12, HIGH); //Обечпечиваем обратное направление вращения ротора на Channel A
digitalWrite(9, LOW); //Отключаем тормоз на Channel A
analogWrite(3, 100); //Вращаем ротор мотора на Channel A на половине максимальных оборотов
if(distance > ambientir — 50){
digitalWrite(12, LOW);
digitalWrite(9, LOW);
analogWrite(3, 100);
Serial.println(distance);
Приведенный выше костяк программы для Arduino можно (и даже нужно!) дорабатывать под вашу конкретную конструкцию, но общий концепт вы должны были уловить.
Какие самые лучшие модули подключения Bluetooth, которые мы можем использовать?
Одно из преимуществ возможности работать с Arduino в том, что он предлагает возможность создавать соединения с другими устройствами без кабелей , для этого он предлагает возможность сделать это через модули bluetooth , это позволит вам включить их в каждый из ваши проекты электроники и робототехники и таким образом получить лучшие результаты. Вот как мы вам покажем какие модули подключения bluetooth самые лучшие что вы можете начать использовать на платформа Arduino.

Для этого следуйте списку, который мы вам покажем ниже:
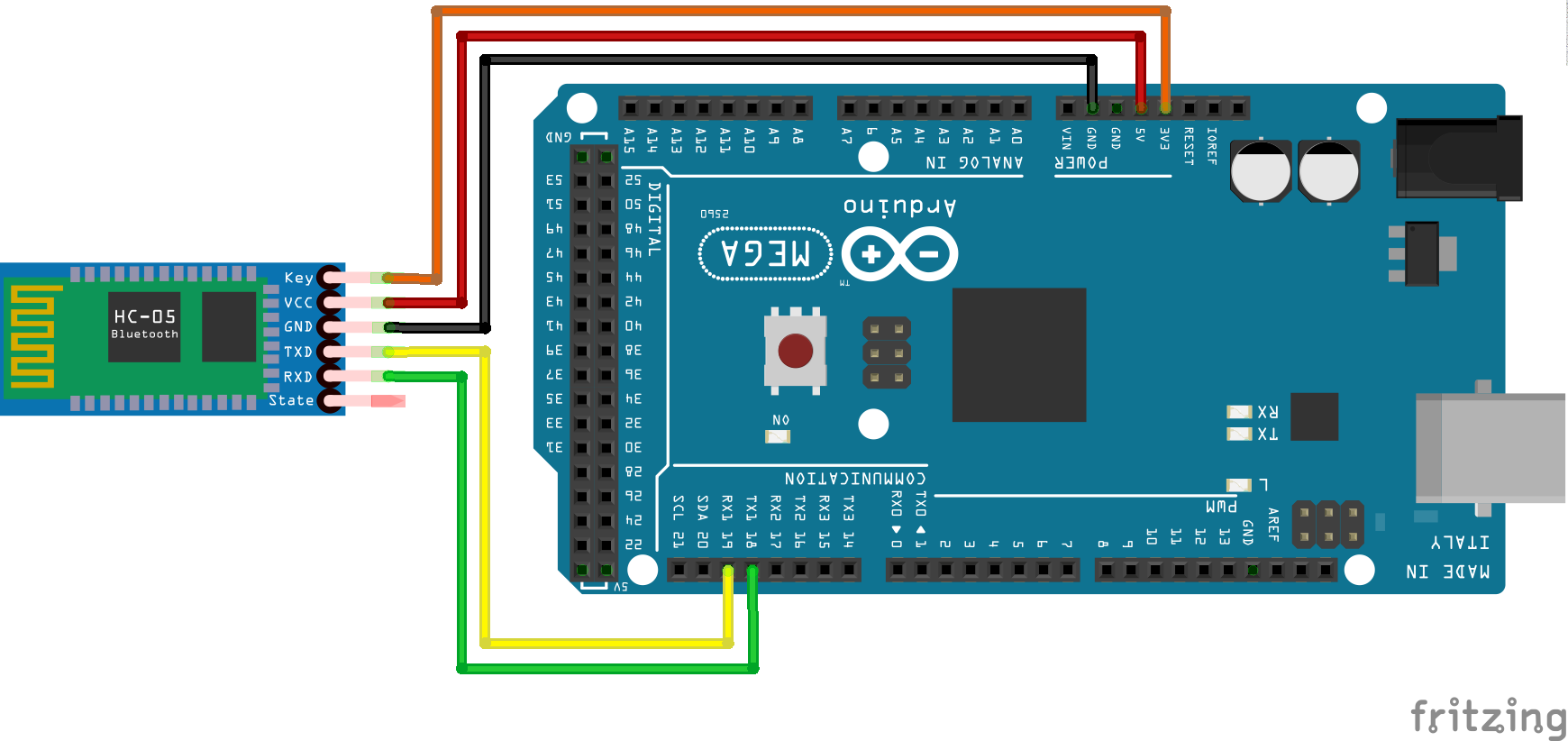
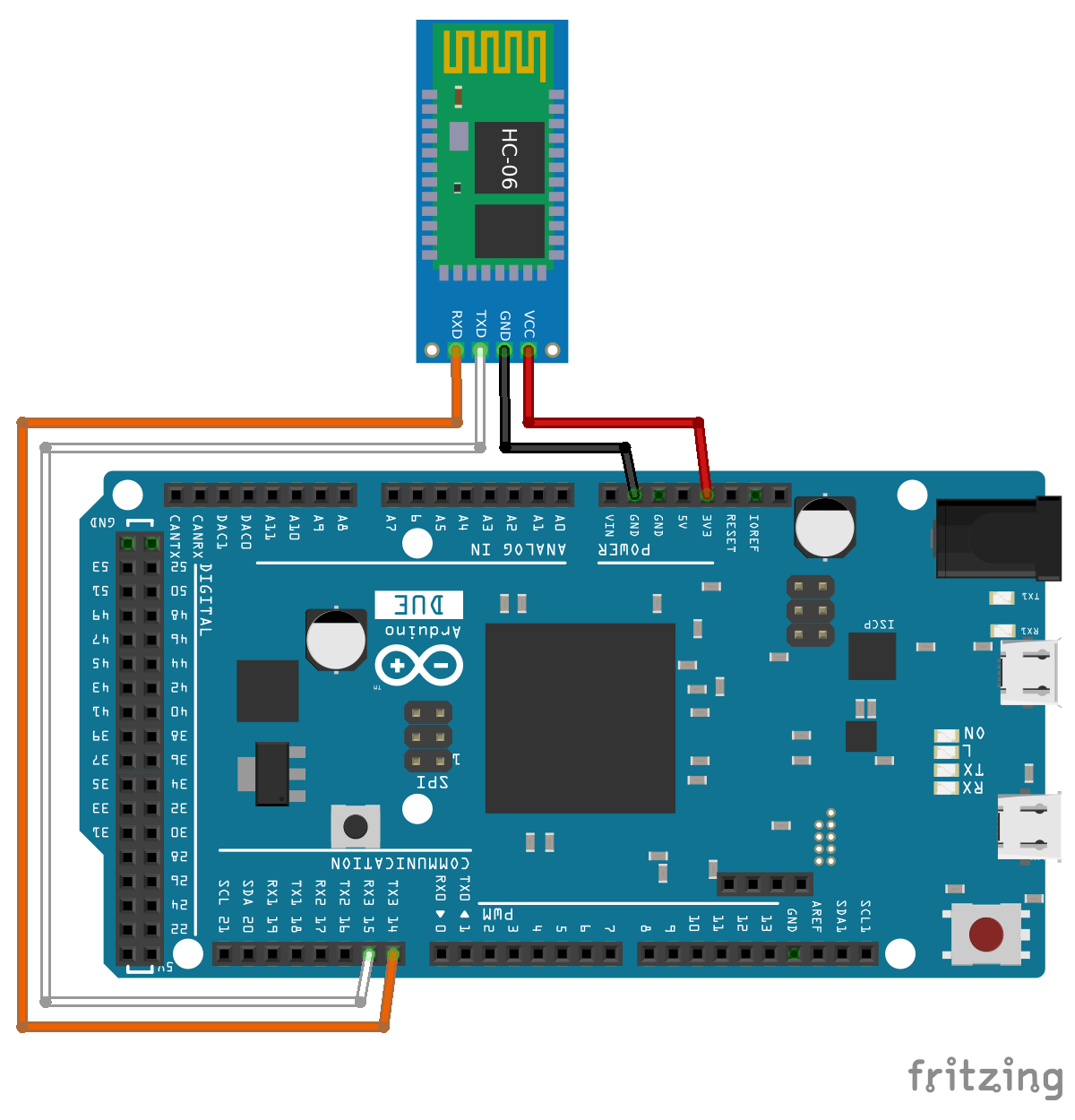
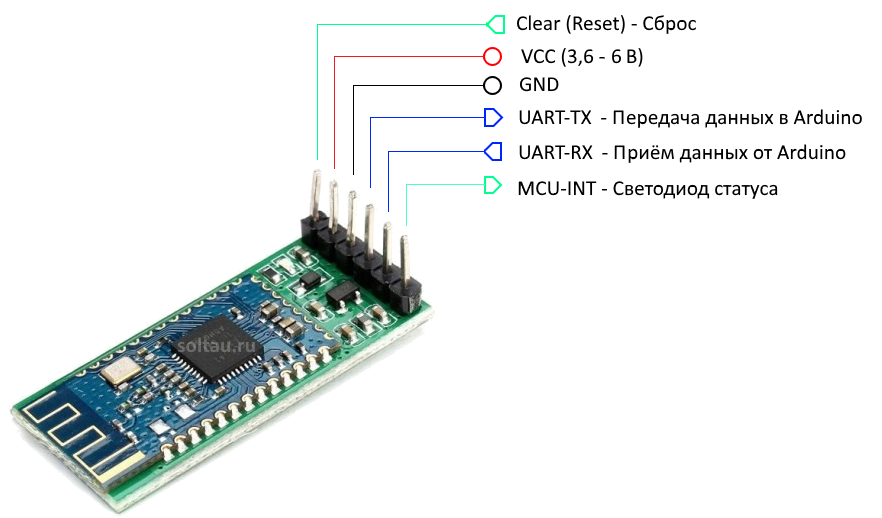
Модуль HC-05 и HC-06
Оба модули bluetooth которые можно использовать для коммуникации различных проектов Arduino с этим беспроводное соединение , по сути, это два наиболее часто используемых модуля для этого вида деятельности. В настоящее время большинство людей думают, что этот тип подключение устаревшая технология , но правда в том, что благодаря ему можно разработать множество очень важных действий и действий.
Необходимо учитывать, что в случае Модуль HC-06, он ведет себя как подчиненное устройство, то есть постоянно ждет запросов на соединение. Следовательно, если устройство подключено, модуль HC-06 ему передает все данные, полученные от Ардуино и наоборот . Когда вы физически видите модуль HC-06, вы можете видеть, что он очень похож на другие, доступные на рынке.
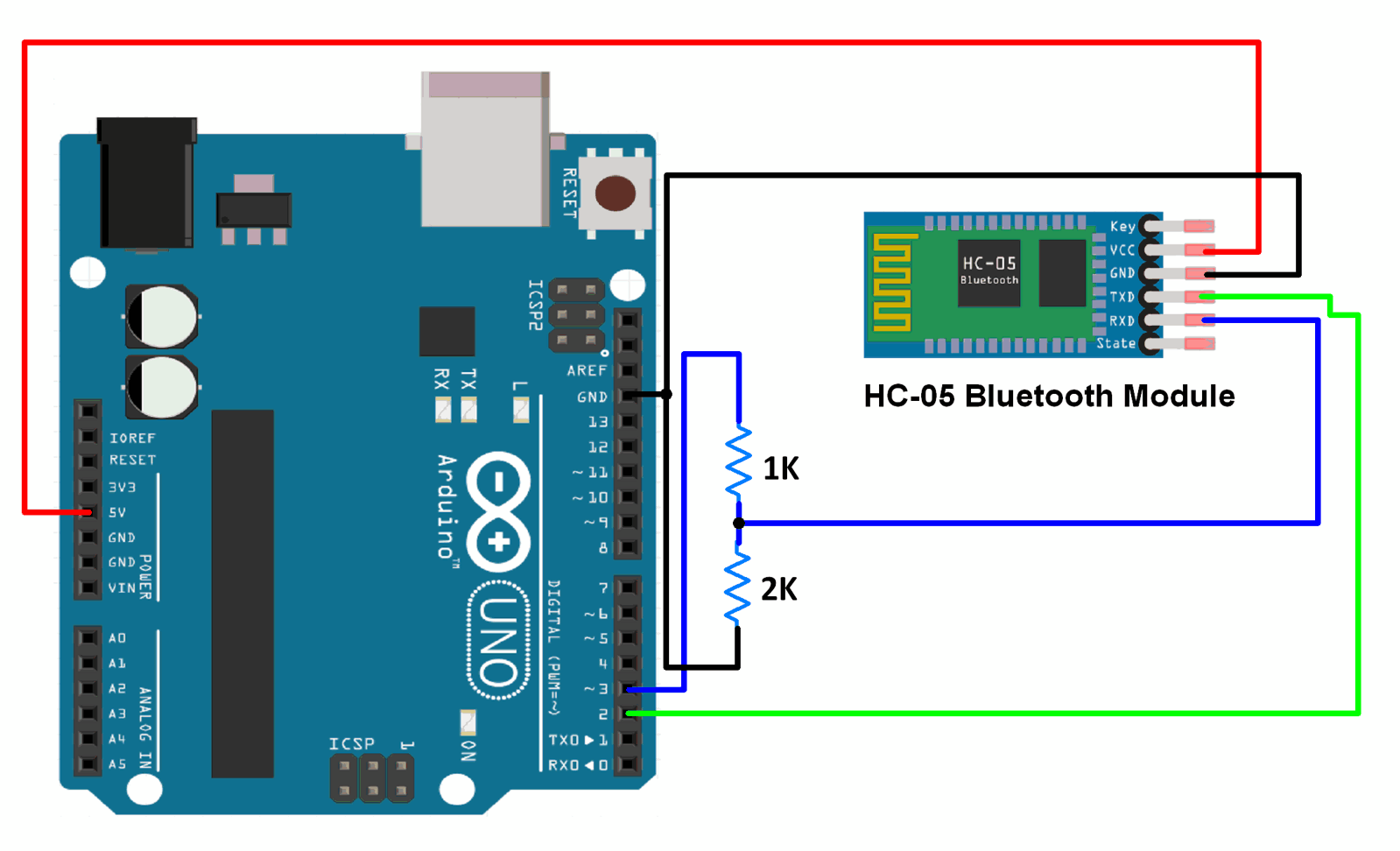
Также следует отметить, что HC-06 работает как ведомый, а HC-05 как ведущий и ведомый , в этом случае HC-05 имеет в общей сложности 6 контактов, в то время как HC-06 имеет всего 4 контакта .
Модуль Bluefruit EZ-Key
Блюфрут EZ-Key используется для создания того, что из контроллеры клавиатуры беспроводной именно поэтому этот модуль считается довольно быстрым и простым в обращении. Так что этот bluetooth-контроллер отлично работает с любыми Устройство с поддержкой BT, будь то Mac, Linux, Windows, Android или iOS.
Он также имеет в общей сложности 12 входных контактов , нажатие одной из его кнопок автоматически отправит набор текста на компьютере . Таким образом, Блюфрут EZ-Key стал идеальным вариантом для всех проекты arduino где нужна клавиатура.
Где купить платформу и запчасти
Все, о чем говорится в этой статье, можно без проблем купить на всем известном сайте. К сожалению, подавляющее большинство предложений основываются на стандартной платформе 4WD автомобиля с двумя несущими планками, не очень надежными двигателями и колесами, любящими ездить в “развалочку”. Но эти варианты относительно не дороги и вполне подойдут для начала работы.
Платформа Ардуино 4WD с двигателями, колесами и рамой без электронных компонентов
4WD платформа для Ардуино с необычным видом крепления элементов
Конструктор машинки Ардуино на платформе 4WD с пультом управления Bluetooth и PS2
Типовой набор 4WD машинки с Ардуино, шилдами и основными датчиками
Распараллеливание ходовых колес
Проблема: у motor shield два выхода, каждый из которых выдает до 2 ампер. Каждый двигатель ест по 0,7А. Вроде меньше, но не при максимальных нагрузках. Допустим, машинка застряла в песке или уперлась, ток возрастает выше ампера. Не критично, но потенциально опасно.
А вот критичным оказалось то, что плата греется. Через минуты полторы после заезда, motor shield нагревалась и начинала работать безобразно: токи подаются не те, колеса не крутятся и прочее.
Решение обоих проблем: один двигатель подключил к одной motor shield, второй – к другой. Как ни странно, помогло. Температура упала, перегрев отсутствует. Можно было поставить радиатор, но крепить тяжело.


Рекомендуем:
 Чайный домик в стиле «Primitive»
Чайный домик в стиле «Primitive»
 Словесные часы на голландском языке
Словесные часы на голландском языке
 Огненный мачете постапокалипсиса
Огненный мачете постапокалипсиса
 20 крутых открыток на день рождения своими руками
20 крутых открыток на день рождения своими руками
 Самодельный стул для бара из старой винной дубовой бочки
Самодельный стул для бара из старой винной дубовой бочки
 Насадка, превращающая дрель в мини токарный станок
Насадка, превращающая дрель в мини токарный станок
 Подставка для телефона из дерева своими руками
Подставка для телефона из дерева своими руками
 Фотобудка для свадеб, именин и других мероприятий
Фотобудка для свадеб, именин и других мероприятий
 Лунный светильник из пластика, эпоксидной смолы и цемента
Лунный светильник из пластика, эпоксидной смолы и цемента
 Шилдик из логотипа сайта
Шилдик из логотипа сайта